宇树GD01载人变形机甲上的传感器,390万背后有哪些真本事!
 0
0

2026年5月,宇树科技正式发布全球首款量产版载人变形机甲GD01,以390万元起的定价、人形与四足双模式无缝切换的黑科技,引爆科技圈。这款身高约3米、载人后重量达500公斤的“钢铁巨人”背后,是各类传感器的协同工作,帮助其实现稳定运行、精准操控,这些传感器的技术突破,藏着高端制造领域感知技术的全新发展方向。
Part.0 1
GD01载人变形机甲是什么

宇树GD01作为全球首款实现量产的载人变形机甲,打破了人们对机器人的传统认知,其核心亮点集中在变形能力、动力性能与场景适配性三大方面。该机甲采用半开放式座舱设计,可容纳1名驾驶员通过摇杆操控,机身搭载约160个精密关节与自研高扭矩伺服电机,采用高强度合金与碳纤维复合材料打造,在保证500公斤载重支撑的同时,可在数秒内完成人形直立与四足爬行的无缝切换。

这一切酷炫功能的实现,离不开遍布机身的传感器系统。GD01的每一次变形、每一步行走、每一次精准发力,都依赖各类传感器的毫秒级数据采集与反馈,构建起一套完整的“感知-决策-执行”闭环系统。
Part.0 2
核心传感器——钢铁之躯的“感知神经网络”

宇树GD01的传感器系统采用“分布式布局、多模态融合”的设计思路,覆盖姿态感知、受力检测、环境识别三大核心需求,主要搭载以下四类关键传感器,每一类都承担着不可或缺的作用,共同构成机甲的“感知神经网络”。
其中,本体感知采用高精度IMU、关节绝对编码器、电流传感器,足部感知来自足底压力/力矩传感器(六维力传感器),环境感知则来自前向深度相机(避障),可能配备激光雷达(SLAM导航),人机交互则采用驾驶舱内操控杆/触摸屏、语音交互模块。
惯性测量单元(IMU)是GD01实现姿态控制与平衡稳定的核心传感器,GD01在变形时,重心会发生剧烈、快速的偏移,任何数据延迟或误差都可能导致机甲摔倒。IMU的毫秒级数据采集能力,配合融合了模型预测控制(MPC)和强化学习的平衡算法,能让机甲在重心偏移发生前就预判姿态变化,提前规划关节力矩调整。
足底六维力传感器是GD01实现稳健行走与地面适配的关键,它能够精准测量三个方向的力(上下、前后、左右)和三个方向的力矩,实时感知地面反作用力、接触面积以及地面平整度,反馈机甲与地面的接触状态。在人形模式下,该传感器可检测每一步的受力分布,确保机甲行走时重心均匀,避免因受力不均导致失衡;在四足模式下,它能配合平衡算法动态调整各足的受力大小,适配不同硬度、坡度的地面,甚至在崎岖地形中也能精准找到落脚点。此外,足底六维力传感器的数据分析,还能帮助机甲判断地面是否存在打滑、塌陷等风险,及时启动纠错机制,保障驾驶员安全。
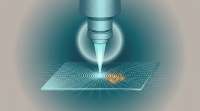
3D激光雷达则相当于机甲的“眼睛”,负责全方位感知周围环境通过发射激光束扫描周围空间,在复杂场景中,3D激光雷达的作用尤为关键:遇到废墟、斜坡等复杂地形时,它能配合四足模式的切换,动态规划机甲的落脚点,实现全地形适应。与传统视觉传感器相比,3D激光雷达具备抗干扰能力强、环境适应性好、定位精度高的优势,是机甲应对复杂环境的核心感知设备。
关节位置/角度传感器(编码器),则是机甲的“关节感知器”
,GD01拥有约160个精密关节,每个关节都配备了关节位置/角度传感器(编码器),相当于机甲的“关节神经”,负责实时采集关节的转动角度、转动速度等数据,反馈关节的运动状态。这些数据会实时传输给控制系统,确保每个关节的动作精准可控,实现机甲的灵活变形与姿态调整。
Part.0 3
未来前景与核心价值

宇树GD01所搭载的惯性测量单元、六维力传感器、3D激光雷达、编码器等,并非专为机甲量身定制的“小众产品”,而是高端制造业中极具代表性的传感器类型。
随着人形机器人、载人机甲等新兴产品的商业化落地加速,这类传感器的技术需求将持续升级,未来前景广阔,同时将在多个领域释放核心价值。
同时,国产传感器企业正迎来技术兑现期,2024年六维力传感器出货量同比大增1100%,长三角、珠三角、京津冀三大产业集群已形成完整的产业链布局,未来国产化率将持续提升。随着人形机器人产业化加速、国产替代推进、成本持续下降,其应用场景将不断拓展,在高端制造、特种作业、医疗健康等领域释放更大价值,开启“感知智能”的全新时代。
感知芯视界媒体推广/文章发布 隗女士 15061886132(微信同号)
*免责声明:本文版权归原作者所有,本文所用图片、文字如涉及作品版权,请第一时间联系我们删除。本平台旨在提供行业资讯,仅代表作者观点,不代表感知芯视立场。

免费下载





热搜
热门跟贴
相关推荐
-
宇树机器人展示载人机甲,王兴兴亲自乘坐操控,未来感直接拉满!
卡可酱搞笑 6跟贴
-
马斯克点赞,宇树科技“载人机甲”的惊天一跃
零态 18跟贴
-
美国科幻又在中国落地!宇树科技发布载人变形机甲,意义有多大?
踏青云看世界
-
终于知道宇树科技的王兴兴为什么推出一个不成熟的机甲了
荆楚寰宇文枢 2跟贴
-
仁顷事件
MUSICANCER 云音乐特供
00:02
-
中国企业发布载人变形机甲吸引广泛关注
新华社
-
宇树能干的过这个丰田机器人吗
未来考古学
-
宇树机器人行走,去掉遥控器就是高科技,有了遥控器就是大玩具!
快乐搞笑有妹子
-
视觉模型既懂语义,又能还原细节,南洋理工&商汤提出棱镜假说
机器之心Pro
-
人类终于能批量操控原子,40分钟刻入4万个原子,常温稳定可用
DeepTech深科技 5跟贴
-
满身黑科技!特朗普访华乘坐的专机空军一号,防御到底有多逆天
皇朝冰酷 -
情况已如此危急?离开了中国,美国连一架能打仗的F-35都造不出
徐徐道史 -
全新一代理想L9发布:搭载自研芯片马赫M100,售价45.98万元起
新浪财经
-
10美元破解机器人触觉难题!斯坦福开源方案让机械手拥有人类手感
DeepTech深科技
-
天晴了简简单单洗个车,一看就是女人开车,先把雷达擦干净
小朱笑笑 1跟贴
-
什么是进动?这样看才直观!
中科院物理所
-
雷达看不见,步枪打不着!中国这款微型巡飞弹藏着战场绝杀技!
夜猫户外军武
-
饱和攻击竟变自投罗网?看英国“龙”号如何一眼看穿全场
四夕君 44跟贴
-
张延廷:不能排除,伊朗获得了先进雷达,能锁定美军F-35
全局观
-
两女子坐电梯,按亮所有楼层后离开
南阳日报 76跟贴